| .github/workflows | ||
| mujoco_maze | ||
| screenshots | ||
| tests | ||
| .gitignore | ||
| LICENSE | ||
| MANIFEST.in | ||
| poetry.lock | ||
| pyproject.toml | ||
| README.md | ||
| setup.cfg | ||
| setup.py | ||
mujoco-maze
![]()

![]()
Some maze environments for reinforcement learning (RL) based on mujoco-py and openai gym.
Thankfully, this project is based on the code from rllab and tensorflow/models.
Note that d4rl and dm_control have similar maze environments, and you can also check them. But, if you want more customizable or minimal one, I recommend this.
Usage
Importing mujoco_maze registers environments and you can load
environments by gym.make.
All available environments listed are listed in [Environments] section.
E.g.,:
import gym
import mujoco_maze # noqa
env = gym.make("Ant4Rooms-v0")
Environments
-
PointUMaze/AntUmaze
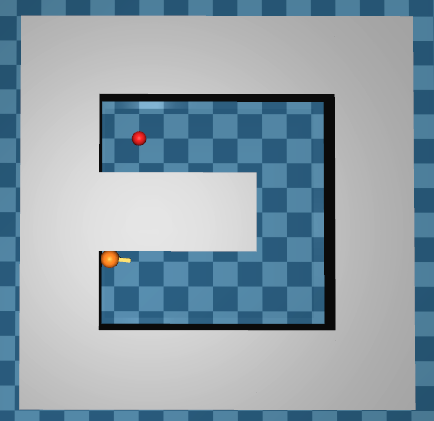
- PointUMaze-v0/AntUMaze-v0 (Distance-based Reward)
- PointUmaze-v1/AntUMaze-v1 (Goal-based Reward i.e., 1.0 or -ε)
-
Point4Rooms/Ant4Rooms
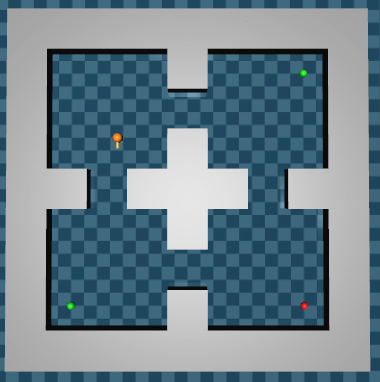
- Point4Rooms-v0/Ant4Rooms-v0 (Distance-based Reward)
- Point4Rooms-v1/Ant4Rooms-v1 (Goal-based Reward)
- Point4Rooms-v2/Ant4Rooms-v2 (Multiple Goals (0.5 pt or 1.0 pt))
-
PointPush/AntPush
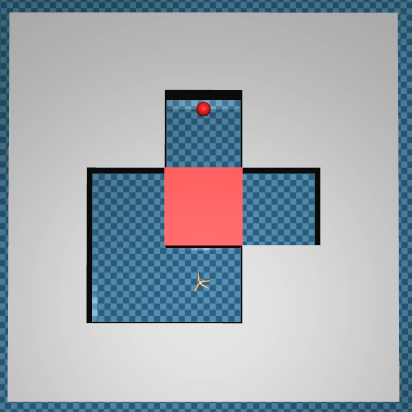
- PointPush-v0/AntPush-v0 (Distance-based Reward)
- PointPush-v1/AntPush-v1 (Goal-based Reward)
-
PointFall/AntFall
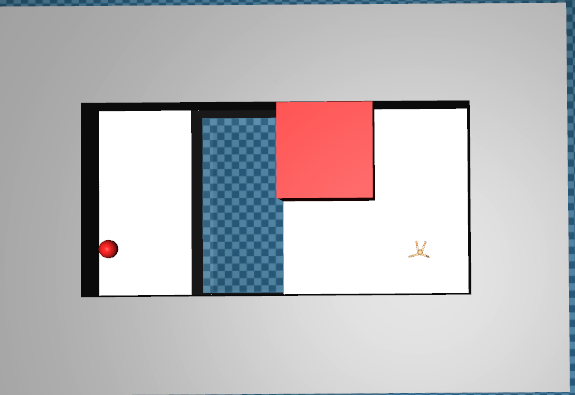
- PointFall-v0/AntFall-v0 (Distance-based Reward)
- PointFall-v1/AntFall-v1 (Goal-based Reward)
-
PointBilliard
- PointBilliard-v0 (Distance-based Reward)
- PointBilliard-v1 (Goal-based Reward)
- PointBilliard-v2 (Multiple Goals (0.5 pt or 1.0 pt))
Customize Environments
You can define your own task by using components in maze_task.py,
like:
import gym
import numpy as np
from mujoco_maze.maze_env_utils import MazeCell
from mujoco_maze.maze_task import MazeGoal, MazeTask
from mujoco_maze.point import PointEnv
class GoalRewardEMaze(MazeTask):
REWARD_THRESHOLD: float = 0.9
PENALTY: float = -0.0001
def __init__(self, scale):
super().__init__(scale)
self.goals = [MazeGoal(np.array([0.0, 4.0]) * scale)]
def reward(self, obs):
return 1.0 if self.termination(obs) else self.PENALTY
@staticmethod
def create_maze():
E, B, R = MazeCell.EMPTY, MazeCell.BLOCK, MazeCell.ROBOT
return [
[B, B, B, B, B],
[B, R, E, E, B],
[B, B, B, E, B],
[B, E, E, E, B],
[B, B, B, E, B],
[B, E, E, E, B],
[B, B, B, B, B],
]
gym.envs.register(
id="PointEMaze-v0",
entry_point="mujoco_maze.maze_env:MazeEnv",
kwargs=dict(
model_cls=PointEnv,
maze_task=GoalRewardEMaze,
maze_size_scaling=GoalRewardEMaze.MAZE_SIZE_SCALING.point,
inner_reward_scaling=GoalRewardEMaze.INNER_REWARD_SCALING,
)
)
You can also customize models. See point.py or so.
Warning
This project has some other environments (e.g., reacher and swimmer) but if they are not on README, they are work in progress and not tested well.
License
This project is licensed under Apache License, Version 2.0 (LICENSE or http://www.apache.org/licenses/LICENSE-2.0).