2.0 KiB
2.0 KiB
mujoco-maze
![]()

![]()
Some maze environments for reinforcement learning(RL) using mujoco-py and openai gym.
Thankfully, this project is based on the code from rllab and tensorflow/models.
Environments
-
PointUMaze/AntUmaze
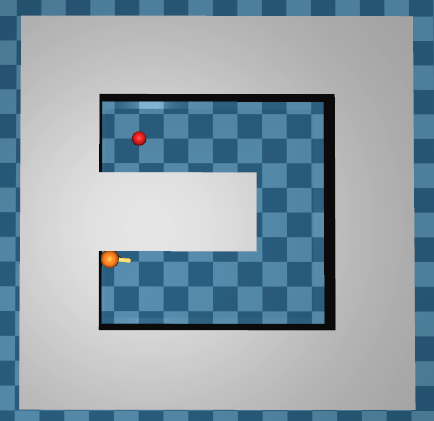
- PointUMaze-v0/AntUMaze-v0 (Distance-based Reward)
- PointUmaze-v1/AntUMaze-v1 (Goal-based Reward i.e., 1.0 or -ε)
-
Point4Rooms/Ant4Rooms
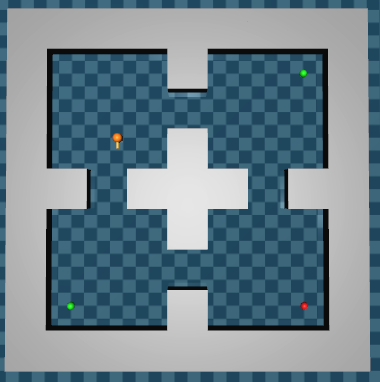
- Point4Rooms-v0/Ant4Rooms-v0 (Distance-based Reward)
- Point4Rooms-v1/Ant4Rooms-v1 (Goal-based Reward)
- Point4Rooms-v2/Ant4Rooms-v2 (Multiple Goals (0.5 pt or 1.0 pt))
-
PointPush/AntPush
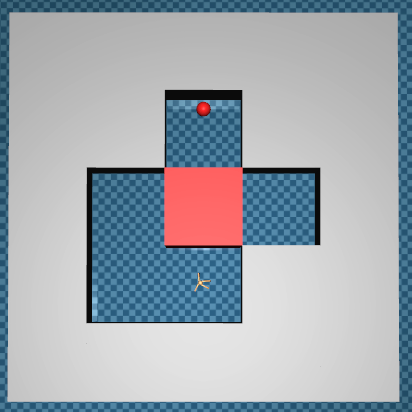
- PointPush-v0/AntPush-v0 (Distance-based Reward)
- PointPush-v1/AntPush-v1 (Goal-based Reward)
-
PointFall/AntFall
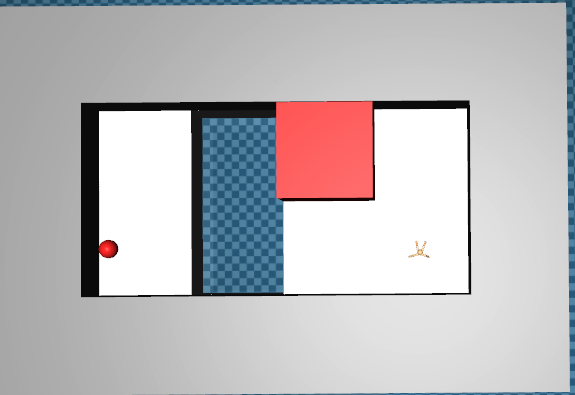
- PointFall-v0/AntFall-v0 (Distance-based Reward)
- PointFall-v1/AntFall-v1 (Goal-based Reward)
-
PointBilliard
- PointBilliard-v0 (Distance-based Reward)
- PointBilliard-v1 (Goal-based Reward)
- PointBilliard-v2 (Multiple Goals (0.5 pt or 1.0 pt))
Warning
This project has some other environments (e.g., reacher and swimmer) but if they are not on README, they are work in progress and not tested well.
License
This project is licensed under Apache License, Version 2.0 (LICENSE-APACHE or http://www.apache.org/licenses/LICENSE-2.0).